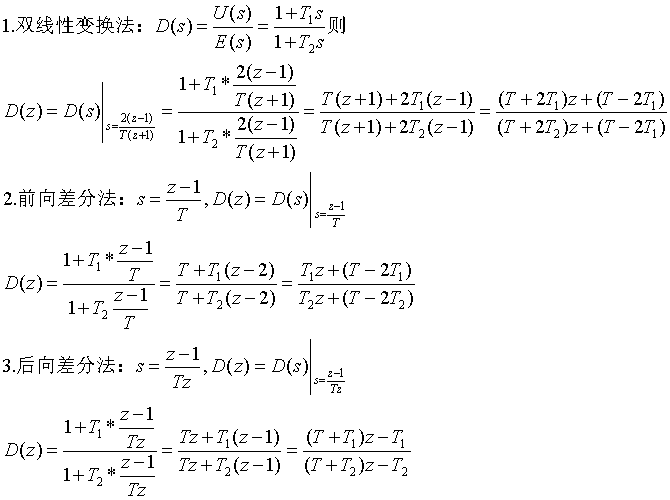
4减1的步骤是,首先设计出来假想之中的连续控制器D(s) ,接着选择采样周期T ,然后把D(S)离散化为D(Z)。
4.设计由计算机实现的控制算法;5.校验
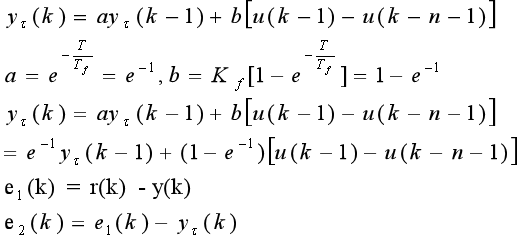
4-2
以上算法可以得到对应递推控制算法
4-3

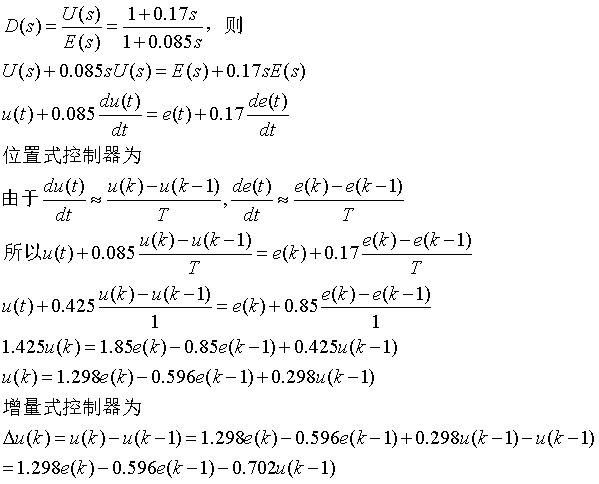
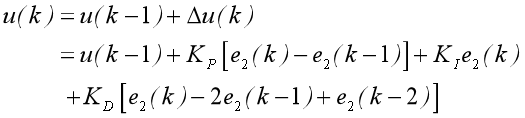
PID位置式控制算法

PID增量式控制算法
(1)增量算法无需进行积分累加,计算误差以及计算精度对于控制量的计算所产生的影响相对较小。但位置算法并非如此。
(2)增量式算法所给出的,是控制量的增量,其对于执行机构误动作的影响较小。位置算法给出的呢,是控制量的全量,这种情况下误动作的影响较大。
(3)采用增量算法易实现手动到自动的无冲击切换。
4-4
在PID位置算法里存在一种情况,即4 - 5积分饱和微型计算机控制技术课后答案,它需要偏差信号的累加值,当这个累加值超出执行机构的额定范围后,执行机构的输出值就不再随着控制信号的增加而增加了。
可以采用积分分离,通过抗积分饱和,运用采用梯形积分提高精度,再消除积分不灵敏区,以此来消除积分饱和。
4 - 6 首先得考虑,依据香农采样定理来着,采样周期上限应当满足这样的条件:T≤π/ωmax ,这里面,ωmax 是被采样信号的上限角频率。采样周期的下限情况呢,是计算机执行控制程序以及输入输出所耗费的时间,系统的采样周期仅仅能够在 Tmin 与 Tmax 之间去进行选择。
其次要考虑
① 给定值的变化频率越高,采样频率就应越高。
② 被控对象是快速变化的,采样周期应小。
③ 执行机构的惯性大,采样周期应大。
④ 控制算法具有多样类型,T过小会致使PID算法的微分积分作用难以显著体现,并且控制算法本身是需要进行计算时间的。
⑤ 控制的回路数:
4-7
1.扩充临界比例度法
步骤:
① 去挑选一个足够短的采样周期,这个采样周期要处于被控对象纯滞后时间的十分之一以下。
先是用选定的采样周期,让系统开始工作,此时,数字控制器将积分作用以及微分作用去除掉,仅仅留存比例作用微型计算机控制技术课后答案,接着逐步把比例度δ减小,这里δ等于1除以KP,一直到系统出现持续等幅振荡,记录下致使系统产生振荡的临界比例度δk,还有系统的临界振荡周期Tk。
③ 选择控制度(>1)。
④ 根据选定的控制度,查表求得T、KP、TI、TD的值。
2.扩充响应曲线法
步骤:
先是数字控制器不接入控制系统,使得系统处于手动操作状况之下,把被调量调节至给定值临近位置,且让其稳定住。接着突然改变给定值,给对象一个阶跃输入信号。
② 使用记录仪表,记录被调量,在阶跃输入的情况下,其整个变化过程曲线,这时,近似为,一个一阶惯性,加纯滞后环节的,响应曲线。
③于曲线最大斜率的所在之处作出切线,进而求得滞后时间τ,再求出被控对象时间常数Tτ以及它们二者的比值Tτ/τ ,接着去查表,如此便能得到数字控制器的KP、TI、TD以及采样周期T。
3.试凑法
其一,最先仅对比例部分进行整定,比例系数从小到大变化,留意相应的系统响应,直至获取反应迅速、超调微小的响应曲线,并且该系统不存在静差亦或是静差已缩小至允许范围以内。
②若静差不能满足设计要求,则须加入积分环节
③若是运用比例积分调节器从而消除了静差,然而动态过程经过反复调整却一直没办法达到满意状态,那么便能够加入微分环节,进而构成比例积分微分调节器。
4-8
数字控制器的离散化设计步骤
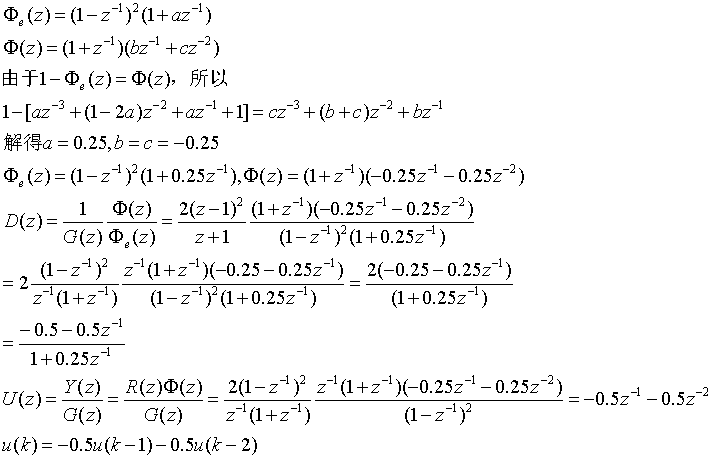
1.根据性能指标和约束条件,确定所需的Ф(z)
2.求广义被控对象的脉冲传递函数G(z),H(s)为零阶保持器

3.求取数字控制器的脉冲传递函数D(z)。
4.根据D(z)求取控制算法的递推计算公式
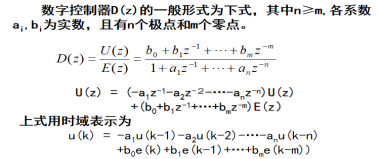
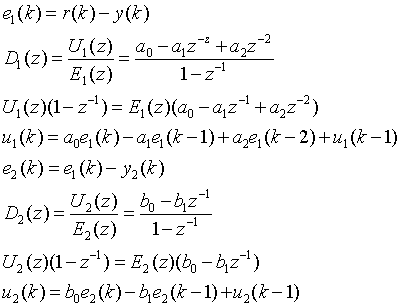
则数字控制器的输出U(z)为

因此,数字控制器D(z)的计算机控制算法为

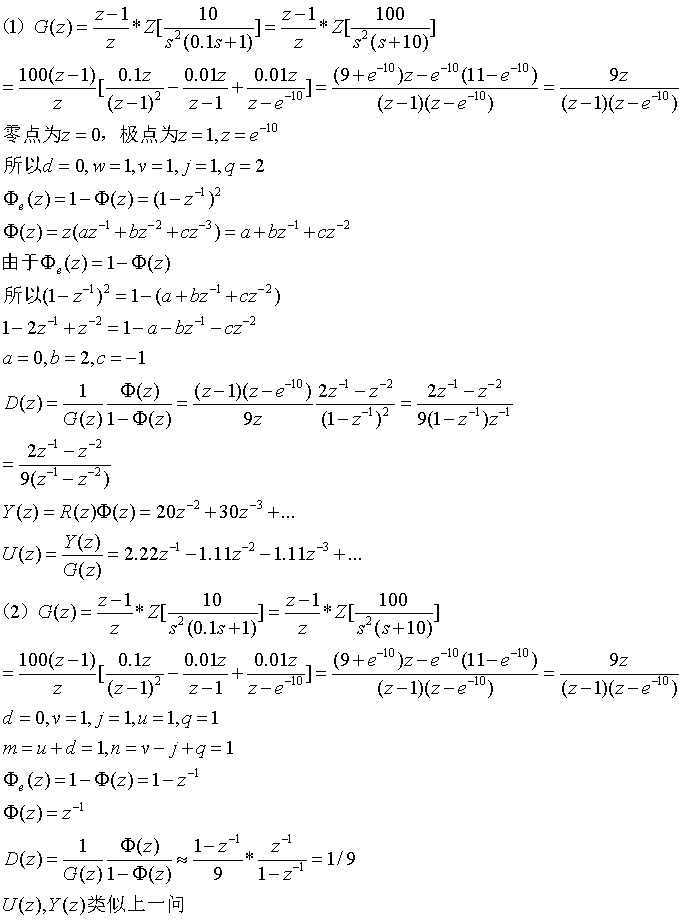
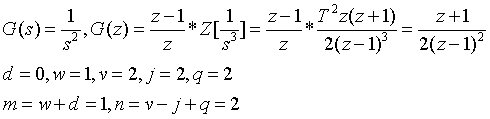
4-9
4-10
4-11

4-12
实现前馈,其必要条件,是扰动量可以被测量,并且具有不可控性,还要使得扰动所引起的被控量变化成为零。
前馈与反馈相结合具备的益处,一方面能够施展前馈控制针对扰动所产生的补偿功效,另一方面还能够留存反馈控制针对偏差所起到的控制效能。
对于4 - 14而言,多变量控制系统解耦存在一定条件,这个条件具体是,系统的闭环传递函数矩阵呈现为对角矩阵。
4-15
模糊控制系统一般组成部分包括物业经理人,模糊控制器,输入输出接口,执行机构,测量装置,被控对象。
常见被用的清晰化办法存在着,为最大隶属度法,还有加权平均原则,以及中位数判决法。
 名师辅导
环球网校
建工网校
会计网校
新东方
医学教育
中小学学历
名师辅导
环球网校
建工网校
会计网校
新东方
医学教育
中小学学历



 免费试听
免费试听

 今日
今日








 您现在的位置:
您现在的位置:














